automation

ROBOTICS + COMPUTER VISION & ML+ COMPUTATIONAL DESIGN
I build algorithms, simulations, and robotic workflows that turn design intent into automated, testable systems — from physics‑informed fabrication to computer vision pipelines.
bridging robotics + design
My work lives at the intersection of Robotics/Machine Learning and Computational Design.
Content
My work can be broken down into three main areas:
-
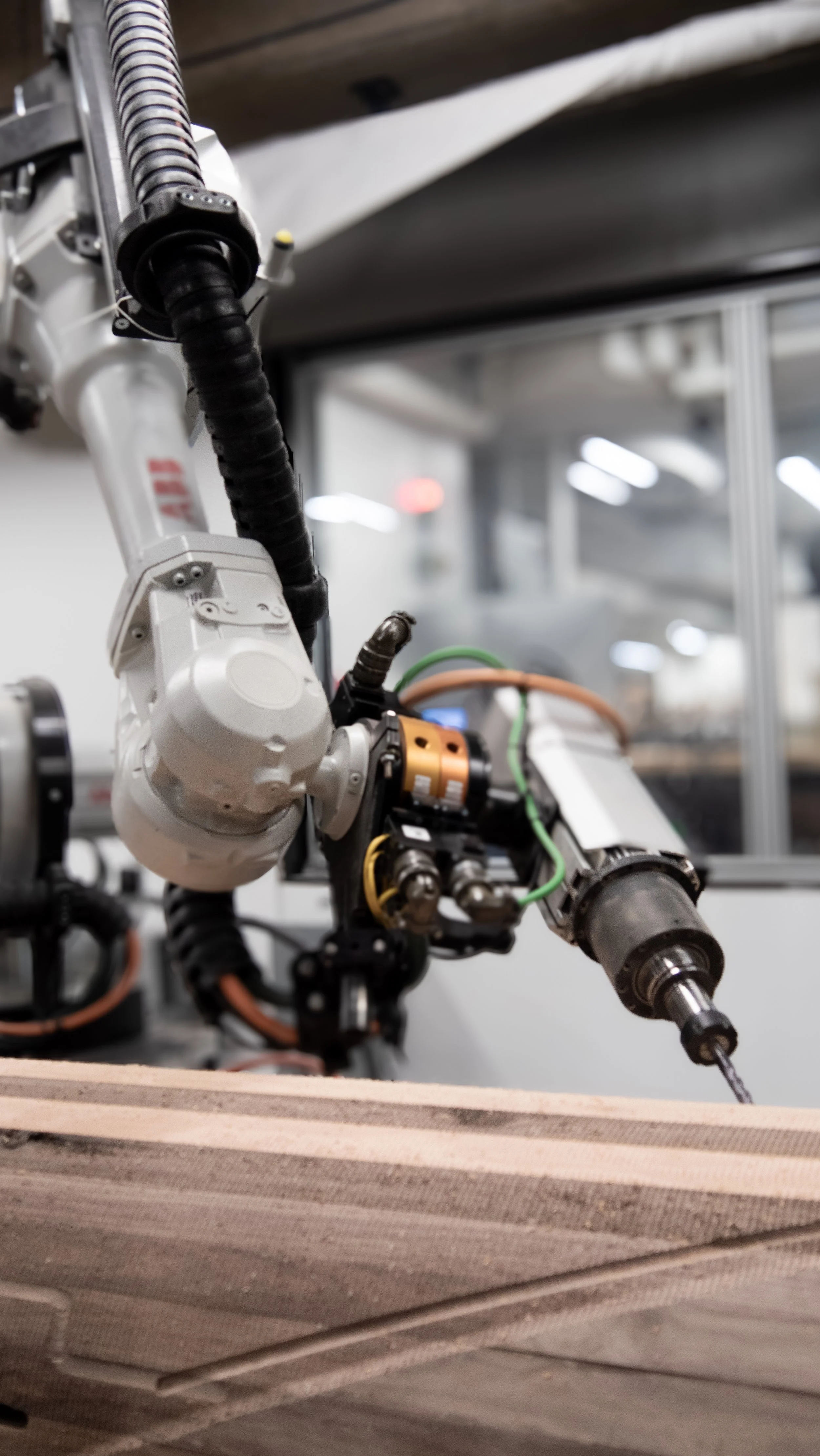
Robotics
My robotics research and professional projects explore sensor-driven fabrication, adaptive assembly, and real-time perception.
-
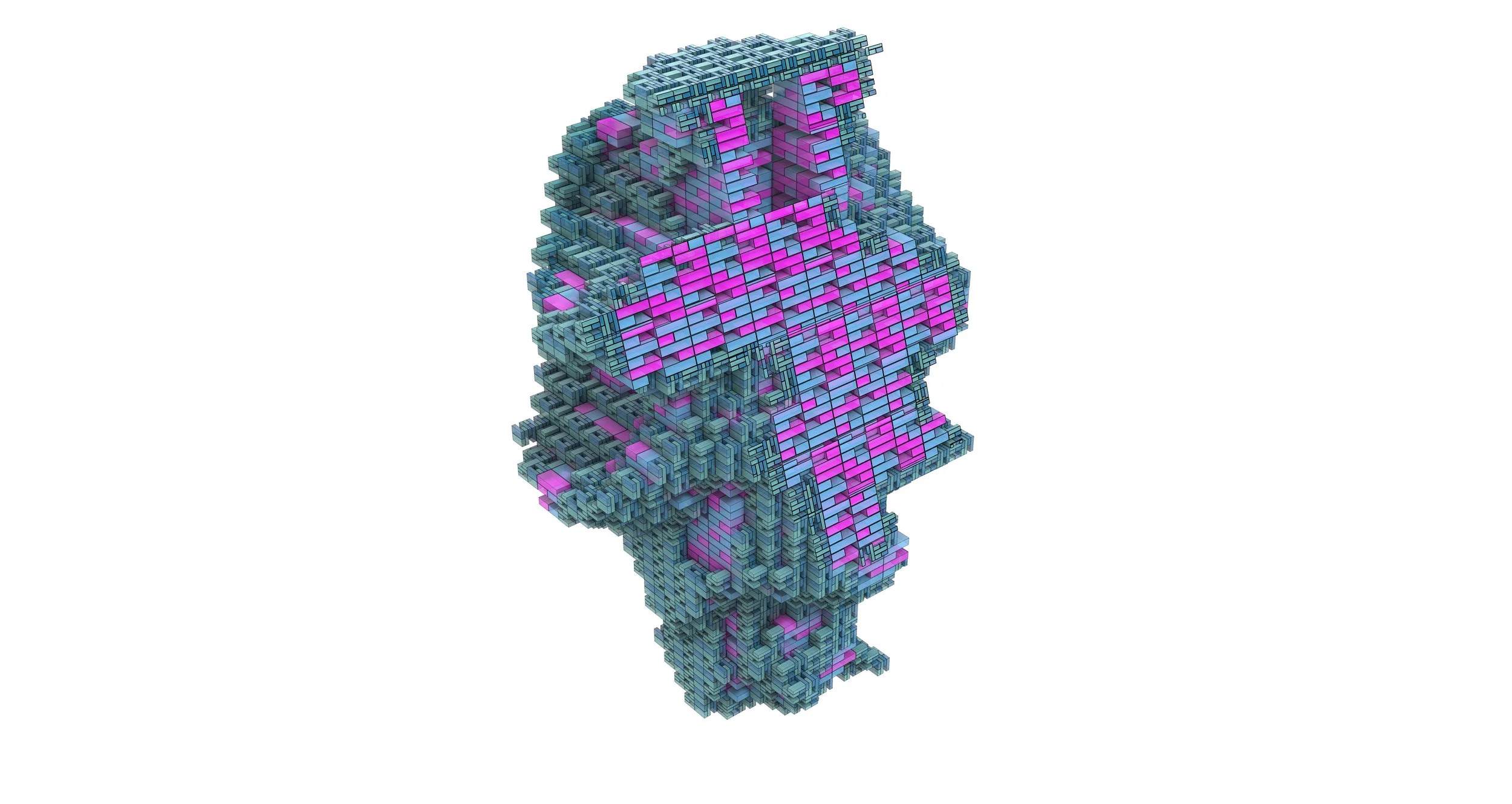
Computational Design
My computational design work focuses on parametric optimization, simulation-driven workflows, and algorithmic form generation.
-
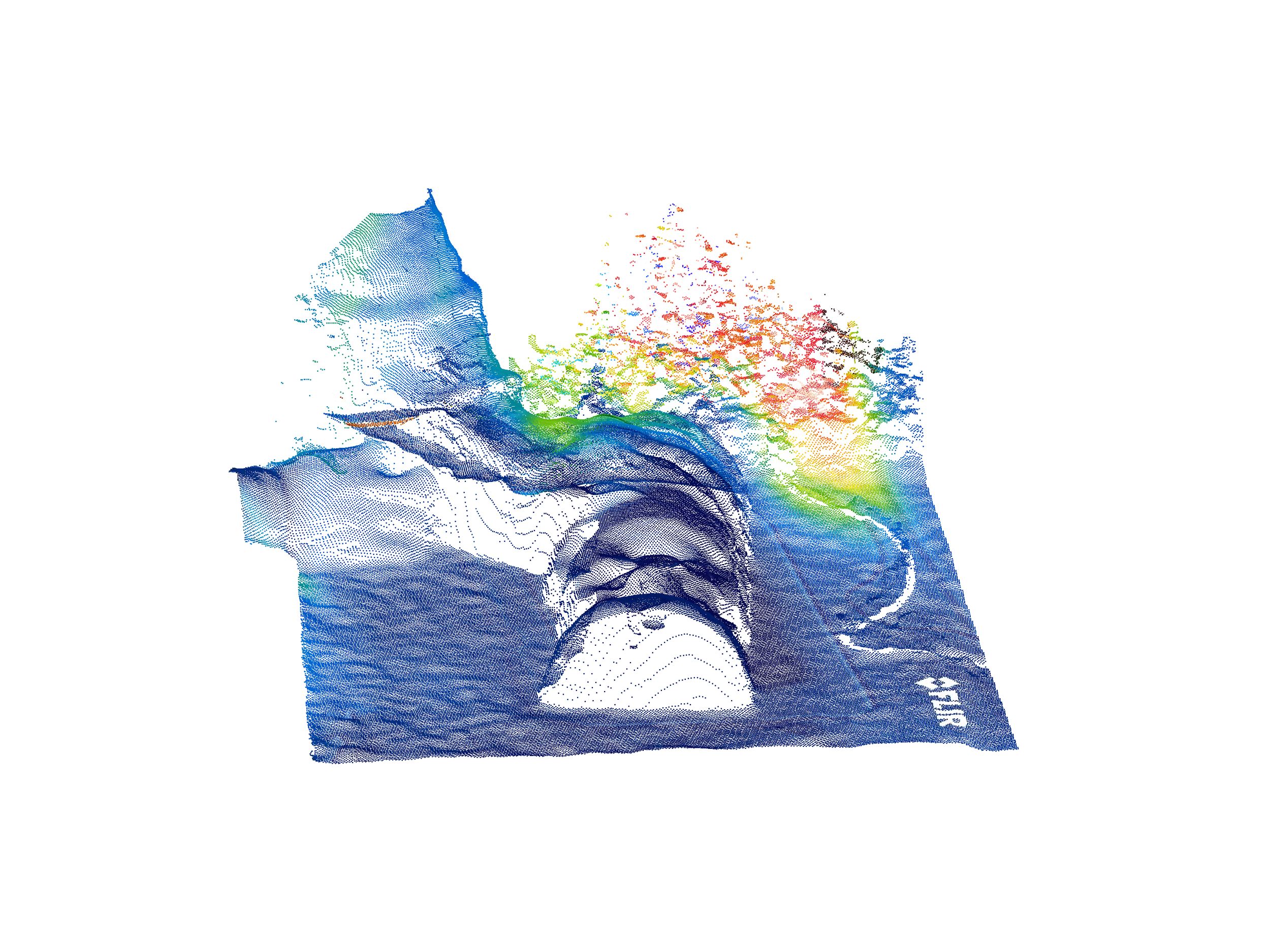
Computer Vision + Machine Learning
I design ML pipelines that interpret 3D data and generate actionable geometry for fabrication and design.