Functionally Graded Timber Structures
The Inner Forms: Functionally Graded Timber Structures project explores the intersection of robotic fabrication, computational design, and machine learning to develop a more material-efficient approach to timber construction. This research tackles the challenge of reducing wood waste by optimizing how timber is processed, laminated, and milled using a barrel construction strategy and 7-axis robotic non-planar milling.
Through this workflow, timber components are strategically placed to balance structural strength and flexibility, integrating hardwood in high-stress areas and softwood where flexibility is beneficial. Additionally, the project introduces machine learning-driven fabrication, utilizing both a YOLO-based wood detection model and a sound classification system to autonomously adjust robotic milling speeds based on wood species.
redefine timber construction
This research explores reducing material waste in timber construction by combining advanced lamination techniques with robotic non-planar milling. Using a 7-axis robotic arm, we milled layered assemblies of soft and hard wood, strategically placing stronger material in high-stress zones while maintaining flexibility elsewhere.
Machine learning supported this workflow by detecting species and adjusting milling speeds in real time. The process was structured into four stages:
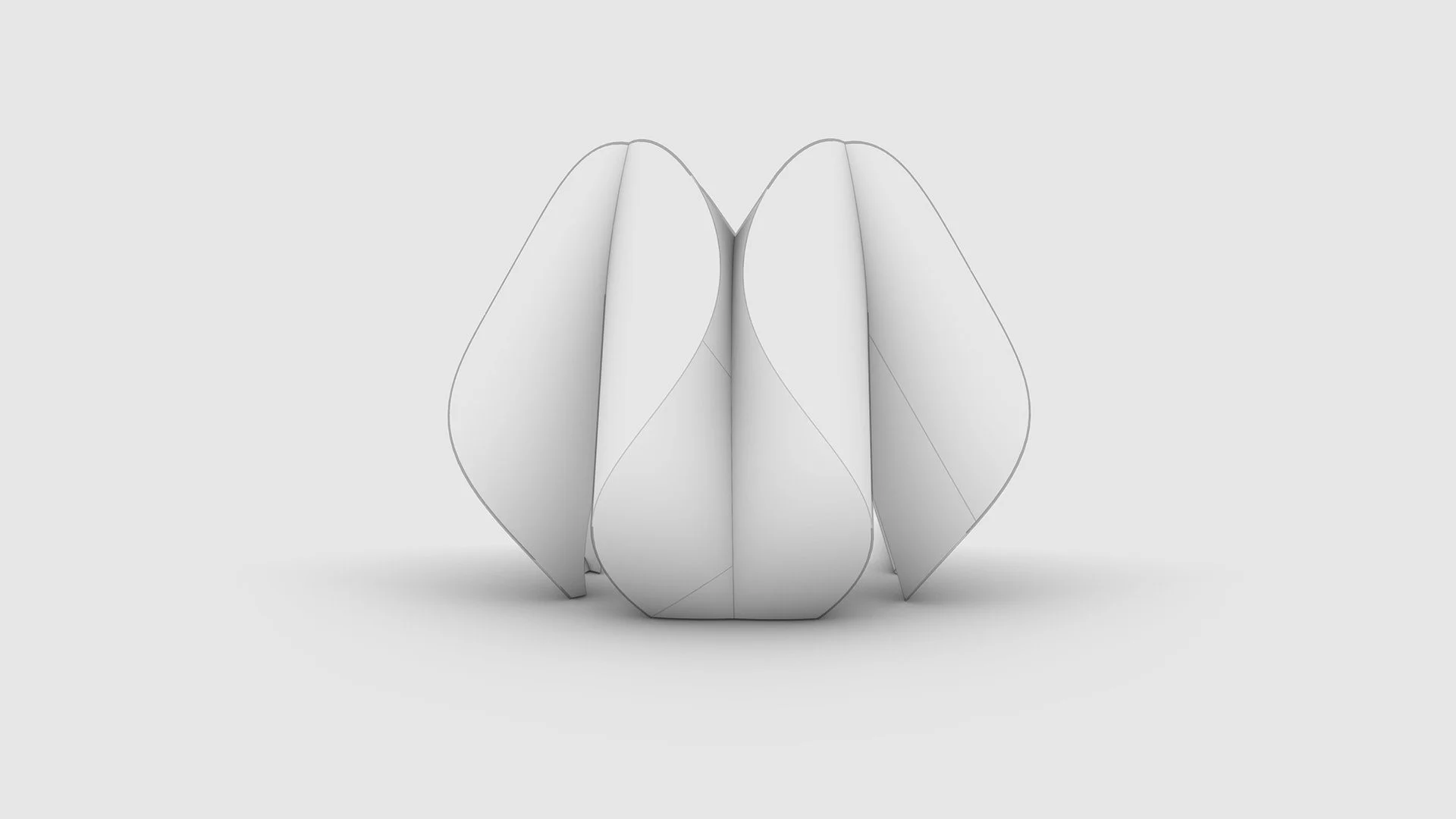
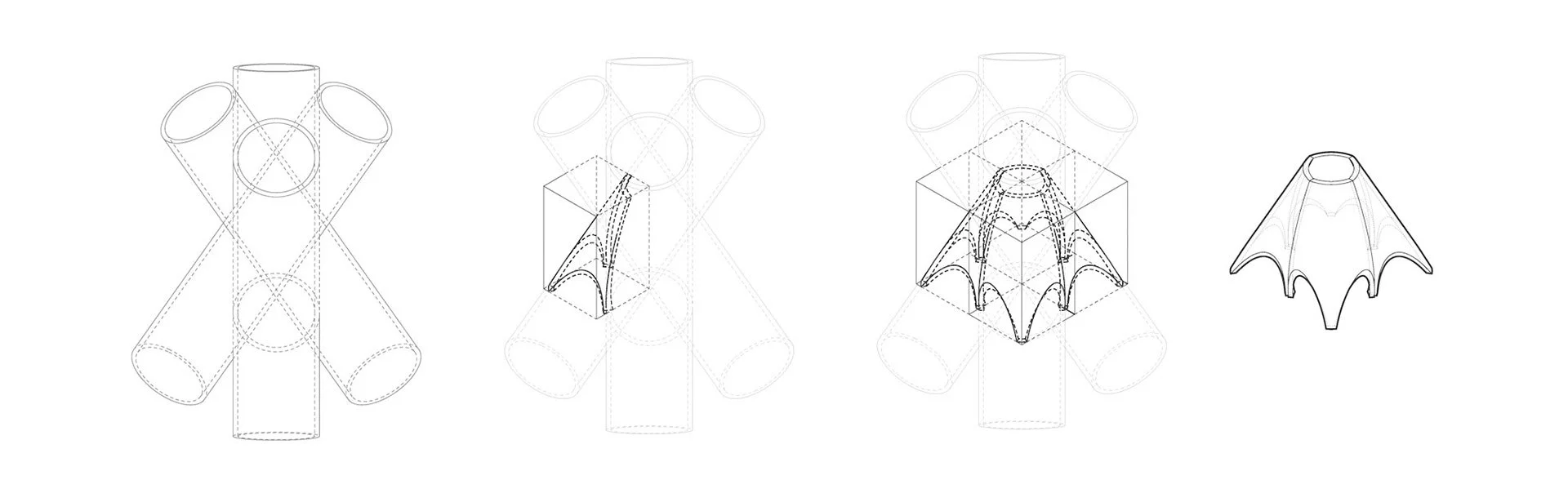
Form Finding – interpenetrating cylindrical geometries for structural exploration.
Wood Lamination – layering hardwood and softwood using cellular automata path generation.
Robotic Fabrication – non-planar toolpaths for efficient milling and bespoke joinery.
Machine Learning Integration – automated recognition of wood species with adaptive robotic responses.
The result is a fabrication system that minimizes waste, enhances performance, and demonstrates new possibilities for sustainable timber construction.
Institution: University of Pennsylvania
Lab: Advanced Research and Innovation lab
Instructor: Alicia Nahmad Vazquez, Patrick Danahy
TA: Mahsa Masalegoo
Lab Managers: Nicholas Sideropoulos, Shunta Moriuchi
In Collaboration with: Zitong Ren, Burcu Gocen, Qingyang Xu.
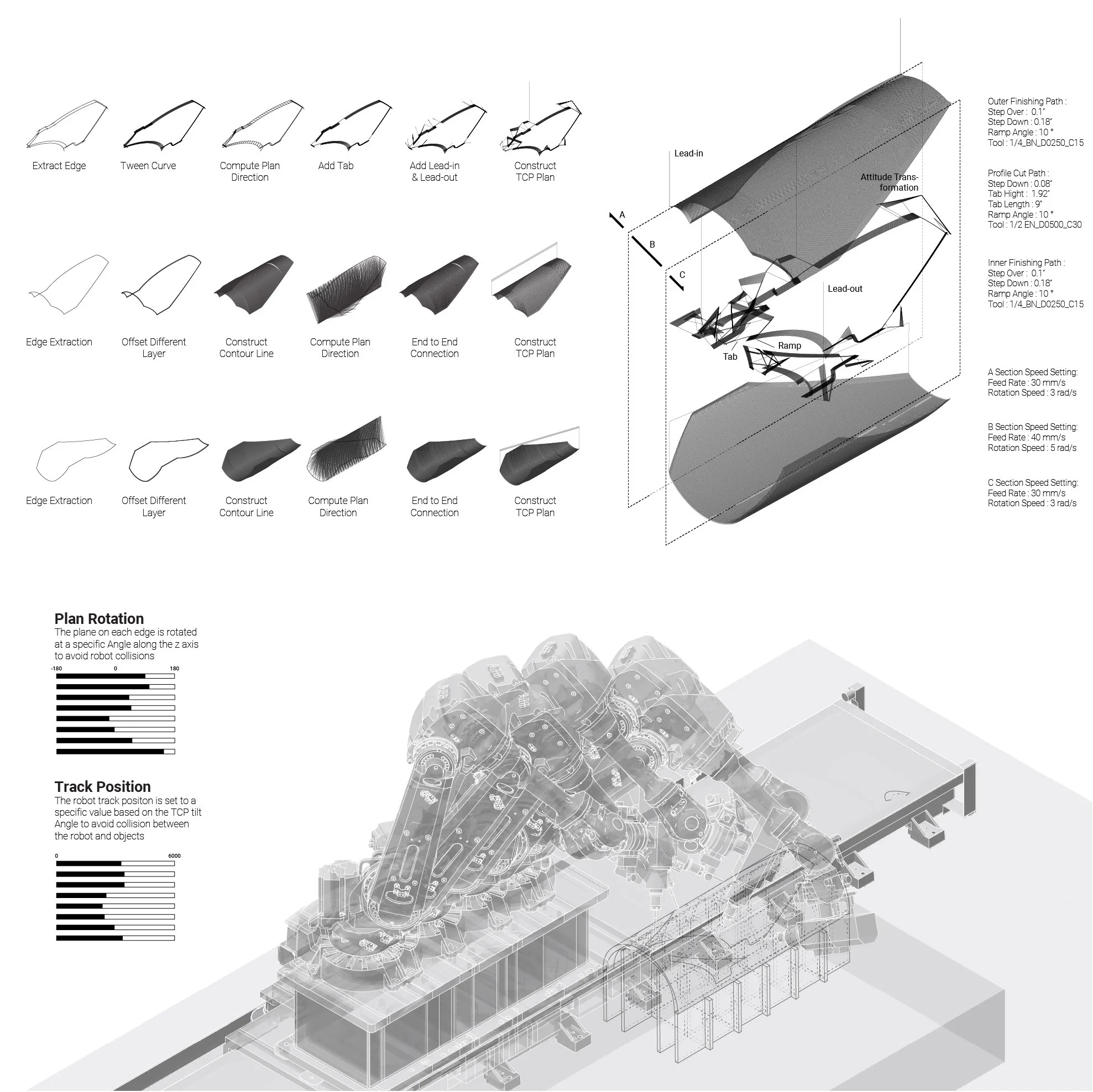
robotic path planning
Using Grasshopper, the tools paths were created. For each piece, we needed an outer finishing path, an inner finishing path, and a profile cut.
Inspired by Frei Otto’s shell structures, this project employs interpenetrating cylindrical geometries to generate self-supporting timber shells. Through a computational form-finding process, these interwoven cylinders define a structurally efficient system that optimizes material distribution while allowing for geometric flexibility. This method enables the creation of complex yet buildable forms, balancing aesthetic exploration with structural performance. By leveraging computational tools, the form-finding process ensures that each shell maintains stability and efficiency, reducing material waste while maximizing aesthetics potential.