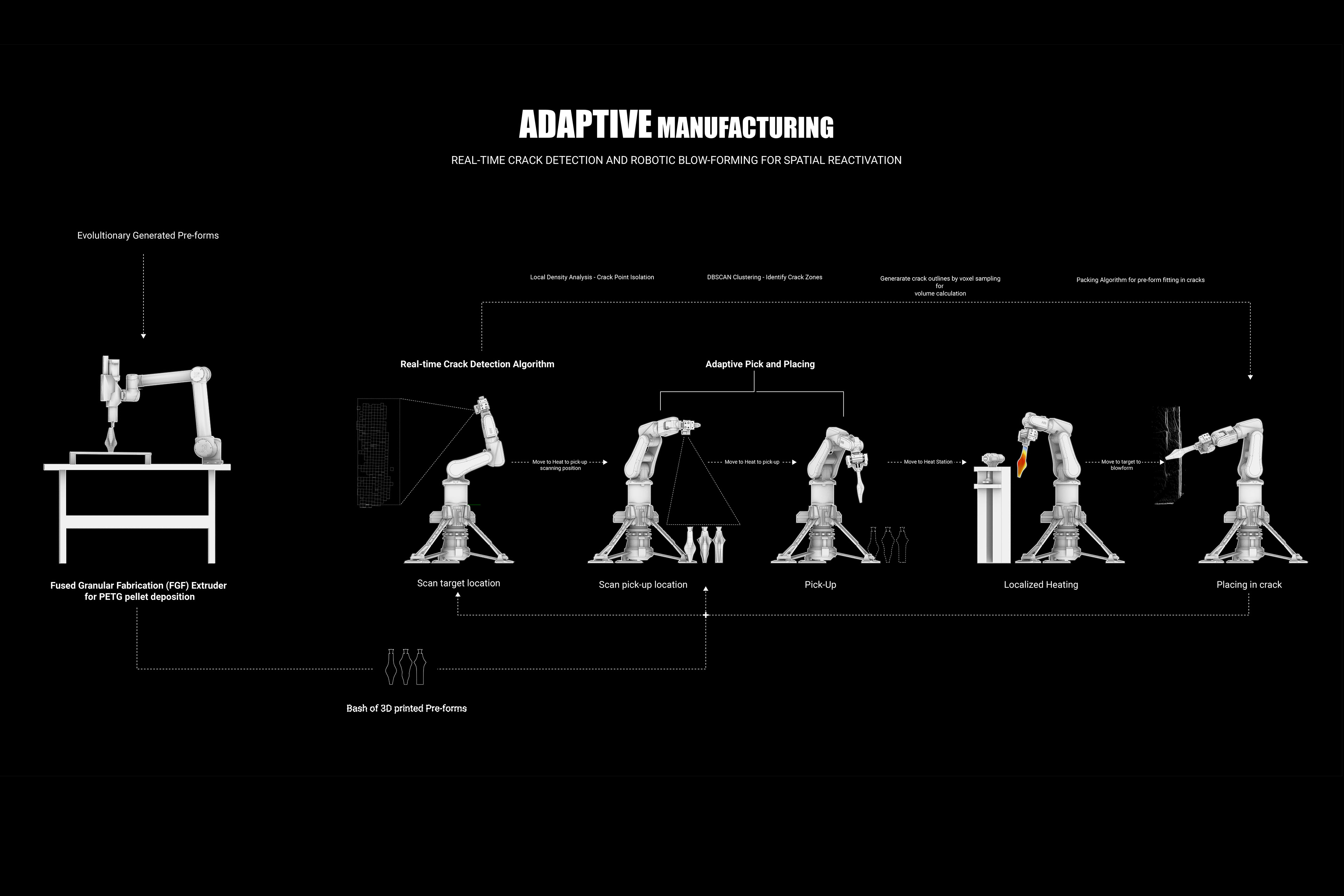
This project presents an in‑situ, real‑time Adaptive Robotic Blow‑Forming workflow for repairing cracks and voids in ruined architectural structures using thermoplastic PETG and computer vision. A custom 3D point‑cloud segmentation algorithm isolates crack geometries via local density analysis and DBSCAN clustering, generating voxelized outlines that guide the creation of interlocking, 3D‑printed PETG pre‑forms. A six‑axis robot pneumatically inflates heated pre‑forms in situ, fusing them into existing masonry and concrete substrates. By foregrounding rather than concealing damage, this method celebrates the historical narratives embedded within ruin—transforming imperfections into both structural repairs and visceral design gestures.
Blow‑forming techniques, long used in glass and plastics, have recently migrated to freeform architectural contexts. Researchers have explored jammed‑particle assemblies and pellet extrusion for bespoke geometries, yet these often require external molds or rigid fixtures. Concurrently, evolutionary algorithms have been applied to generate optimized pre‑forms for pneumatic expansion, balancing inflate‑ability with target‑shape fidelity. Yet, no system currently integrates crack segmentation, pre‑form evolution, and robotic inflation into a closed‑loop repair process.